B01-5
研究概要
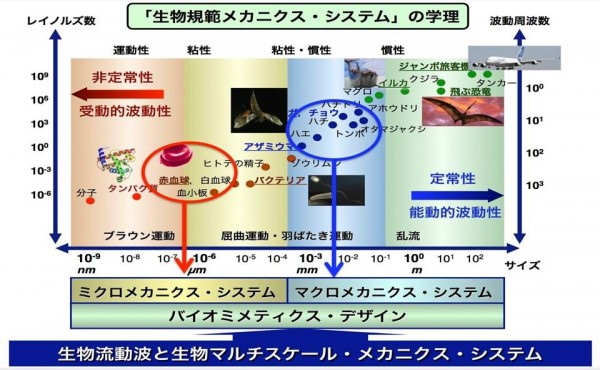
生物規範メカニクスの研究は、下図のようにナノサイズの分子やタンパク質から、ミクロンサイズの細胞やバクテリア、ミリサイズの昆虫や魚 類、そしてメータサイズのイルカやクジラまで、実に11桁もの広大なスケールに亘り、各スケールにおいて、主に形や構造、運動性能、エネルギー消費、情報 伝達等といった各要素技術について、個別に研究対象として取り上げられてきた。しかしながら、多様な形態を持ち、様々な物理的刺激を受けながら、その形 態・運動・機能が常にまわりの環境に適応し淘汰・進化する生物の仕組み、とくに生物のサブセルラー・サイズ構造が生み出す運動メカニクスと、生物マルチス ケール・メカニクス・システムにおけるその効果が殆ど研究されていない。生物の運動は、各スケールにおいて殆ど、波動性(ミクロスケールのブラウン運動、 ミリスケールの屈曲運動や羽ばたき、メータスケールの乱流など)と非定常性によるものものであり、この現象を「生物流動波(Biofluid- wave)」と称したい。
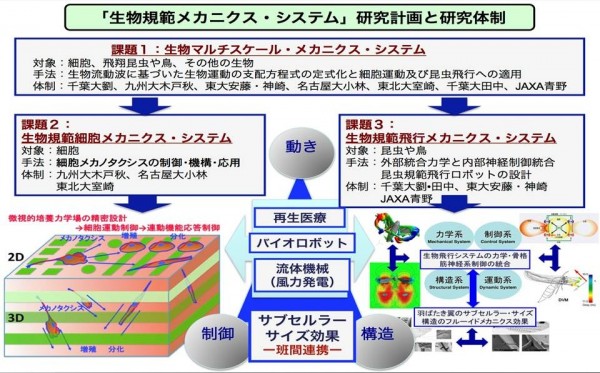
細胞のミクロメカニクスは、その周囲における種々の静的ないし動的な機械力学的環境(力学場)を感知して自らの機能(細胞の 力覚特性)を調節する。細胞を医療用資源として最大限に活用しその機能を十二分に制御して用いるためには、細胞外環境の生物学的条件のみならず力学場条件 の両要因の適切な設計に基づく細胞操作材料〜メカノバイオミメティック材料〜の確立が極めて重要である。一方、昆虫飛行のマクロメカニクスは、複雑な神経 -筋-運動-力学などからなる生物飛行システムであると同時に、時空的に動的変化(飛行行為の維持や修復、環境変化への適応・進化)を行うことから、一つ の開放型システムとなる。昆虫飛行の形態・機能の最適現象と環境変化に対する適応機構の統合的な解明が自律飛行可能な昆虫規範型飛行ロボットの開発と、生 物飛行の多様性や進化への理解にとって極めて重要である。
本研究では、生物マルチスケール・メカニクス・システムにおける生物のサブセルラー・サイズ構造が生み出す運動メカニクスと生物規範メカニクス・システムの探求を最大目標と して、1)生物流動波に基づいた生物マルチスケール・メカニクス・システムの理論体系の構築、2)ミクロメカニクス・システムにおける細胞力覚メカニズムの解明と再生医工学を目指した高機能メカノバイオミメティック材料の創製、3)マクロメカニクス・システムにおける昆虫飛行の生物飛行統合力学・骨格筋神経制御シミュレータの構築と昆虫規範型飛行ロボットの設計指針の確立、4)バイオミメティクス・デザイン指針の創出を目指す。
研究目的
本計画研究では、
1)生物マルチスケール・メカニクス・システムの学理探求と、生物の「動き」に及ぼす「サブセルラー・サイズ」構造が生み出す細胞メカニクスと生物飛行メカニクスの解明、
2)生物規範細胞ミクロメカニクス・システムにおける、細胞の動的力学挙動機序の解明および制御技術の開発と、細胞運動の制御・機構・応用を目指したメカノバイオミメティクスの確立、
3)生物規範飛行マクロメカニクス・システムにおける、昆虫羽ばたき飛行の力学と神経系・行動制御を統合する生物飛行統合力学・神経制御シミュレータの構築と翼表面サブセルラー・サイズ構造がもたらす流体力学効果の解明、
4)幹細胞のメカノバイオミメティックスを活用した新たな細胞運動操作材料の開発と、生物を規範した飛行ロボットや風力発電を含む流体機械の開発を目的とした、バイオミメティクス・デザインの創出を目指す。
28年度の実施計画
(1) 生物規範細胞ミクロメカニクスシステム:これまでに開発している2次元・3次元の細胞運動制御技術の活用を拡大し、細胞運動のメカノバイオロジーのメカニズム研究のさらなる追求として、細胞運動時の周囲のマトリックス環境に見られる応力分布のダイナミクスを調べる。そのデータを生物飛行における流体応答と比較検討し、「生物流動波」の考察のための知見を得る(木戸秋、小林).班間連携として、大園班しわ制御型のゲル材料上での細胞培養系の評価も予定している。
(2) 生物規範飛行マクロメカニクスシステム:1)昆虫羽ばたきに関する内部神経・骨格系と外部力学の相互作用を考慮した運動制御の解析と羽ばたき「同期」現象の解明、2)実験・解析による鳥類翼表面セレーション構造の静音効果の解明と鳥類の内部形態・羽毛微細構造の進化生物学的研究、3)B01-1班との連携による自己組織化微細構造表面に誘導する摩擦抵抗低減の表面サブセルラー・サイズ効果の解明、4)B01-2班との連携による羽ばたき翼マルチスケール流体力学性能効果の解明、5)人工柔軟翼・柔軟胴体をもつ生物規範型飛行ロボット及び風車翼のバイオミメティクス・デザインなどを実施する。(劉、安藤、山崎)生物翼のサブセルラー・サイズ表面構造の力学的機能情報をA01班に提供し「バイオミメティクス・データベース」での生物規範メカニクス・システム機能要素の構築を行うとともに、細胞メカノバイオマテリアルの創製や昆虫規範型ロボットの開発を目指す。
(3) 生物マルチスケールメカニクスシステム: 生物運動の新しいスケーリング法則を、遊泳生物や飛行生物の運動に適応しそれらのスケーリング法則を定量的に記述するとともに、課題2)、3)と連携して細胞や生物器官表面「サブセルラー・サイズ効果」による生物運動の制御原理を明らかにする(劉,木戸秋)。